




Das Team um unser Virtual Reality Datenvisualisierungs-Framework FlaVR arbeitet fortlaufend an der Implementierung neuer Features und Komponenten die es möglich machen komplexe Datenlandschaften auf intuitive Weise zu erfassen. Die Teilnahme an Hackathons ist dabei nur eine Möglichkeit den Stand der Entwicklung auf die Probe zu stellen und potentiellen Nutzern die Vorteile der virtuellen Realität bei der Erforschung von Informationen zu vermitteln. So sind wir auch auf den vom InnoZ (https://www.innoz.de/) ausgerichteten OpenOlli Hackathon aufmerksam geworden.
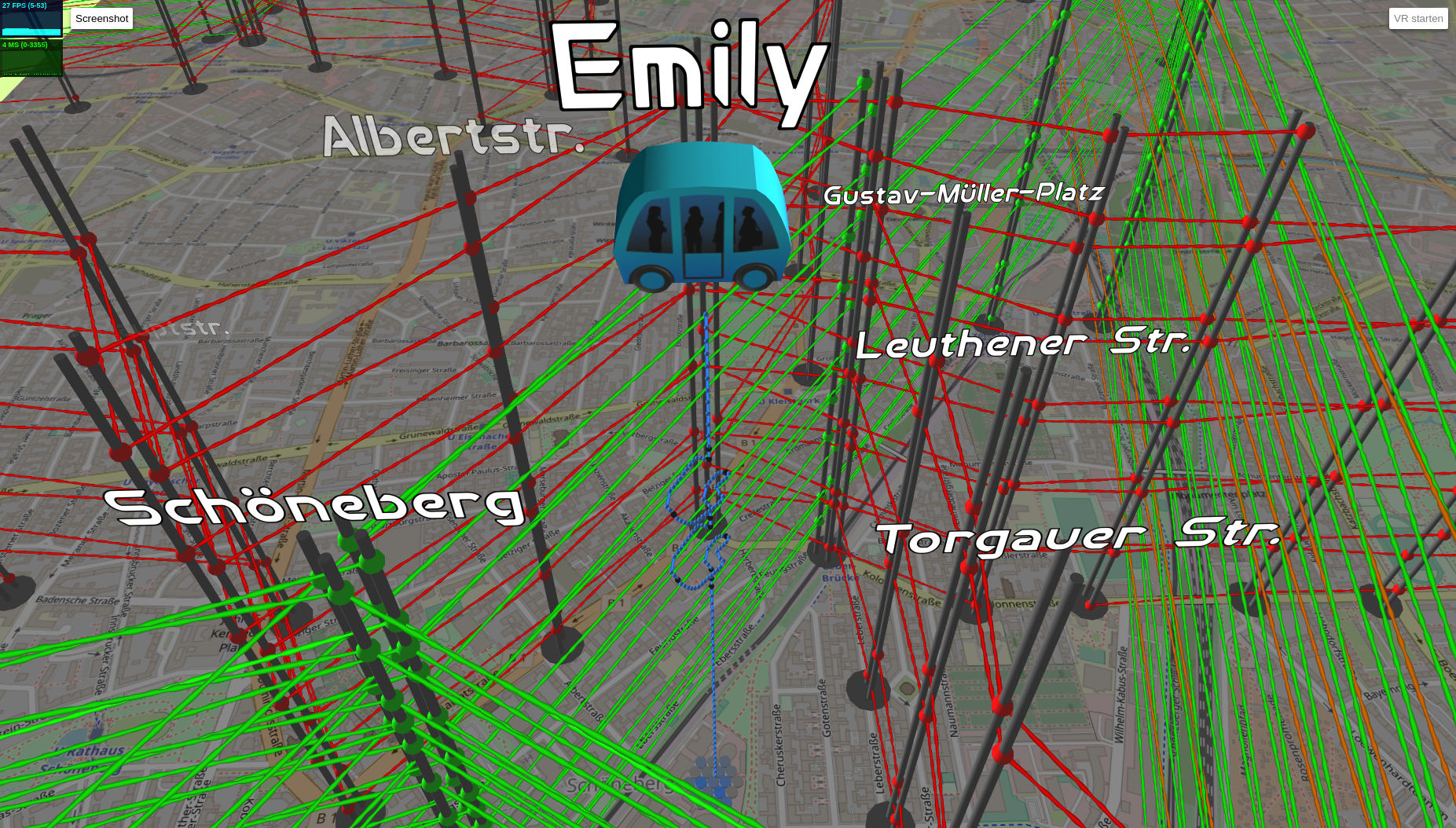
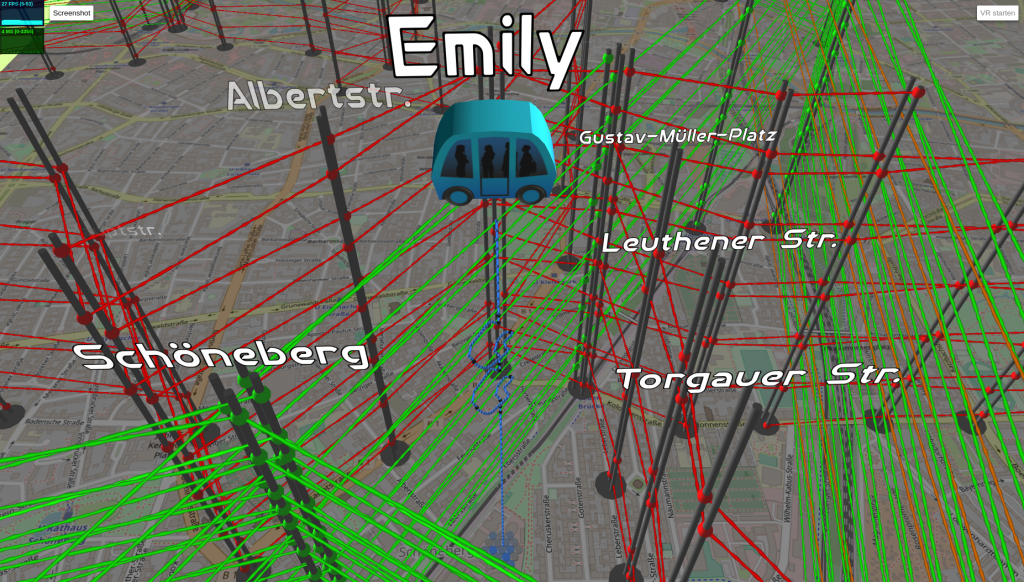
Für den Hackathon wurde vom InnoZ eine Zielvorgabe in Form von zwei Challenges definiert. Die Fahrgast-Challenge fokussierte das Erarbeiten von Lösungen zur „on demand“-Routenplanung autonomer Shuttles. Bei der Betreiber-Challenge ging es um die Frage wie autonome Fahrzeuge den regulären Betrieb bestehender ÖPNV-Angebote ergänzen können. Vom 13.04. bis 04.05.2018 realisierten wir ein Konzept zur Integration der zur Verfügung stehenden Open-Data-Quellen, das den Aufbau von Verkehrsnetzen auf Basis autonom fahrender Busse erleichtern soll. Neben den Daten von Emily, einem auf dem EUREF-Campus autonom fahrenden Shuttles, wurden auch das Streckennetz des ÖPNV in Berlin, sowie Wetter- und Positionsdaten von Elektro-Ladestationen durch den Veranstalter zur Verfügung gestellt.
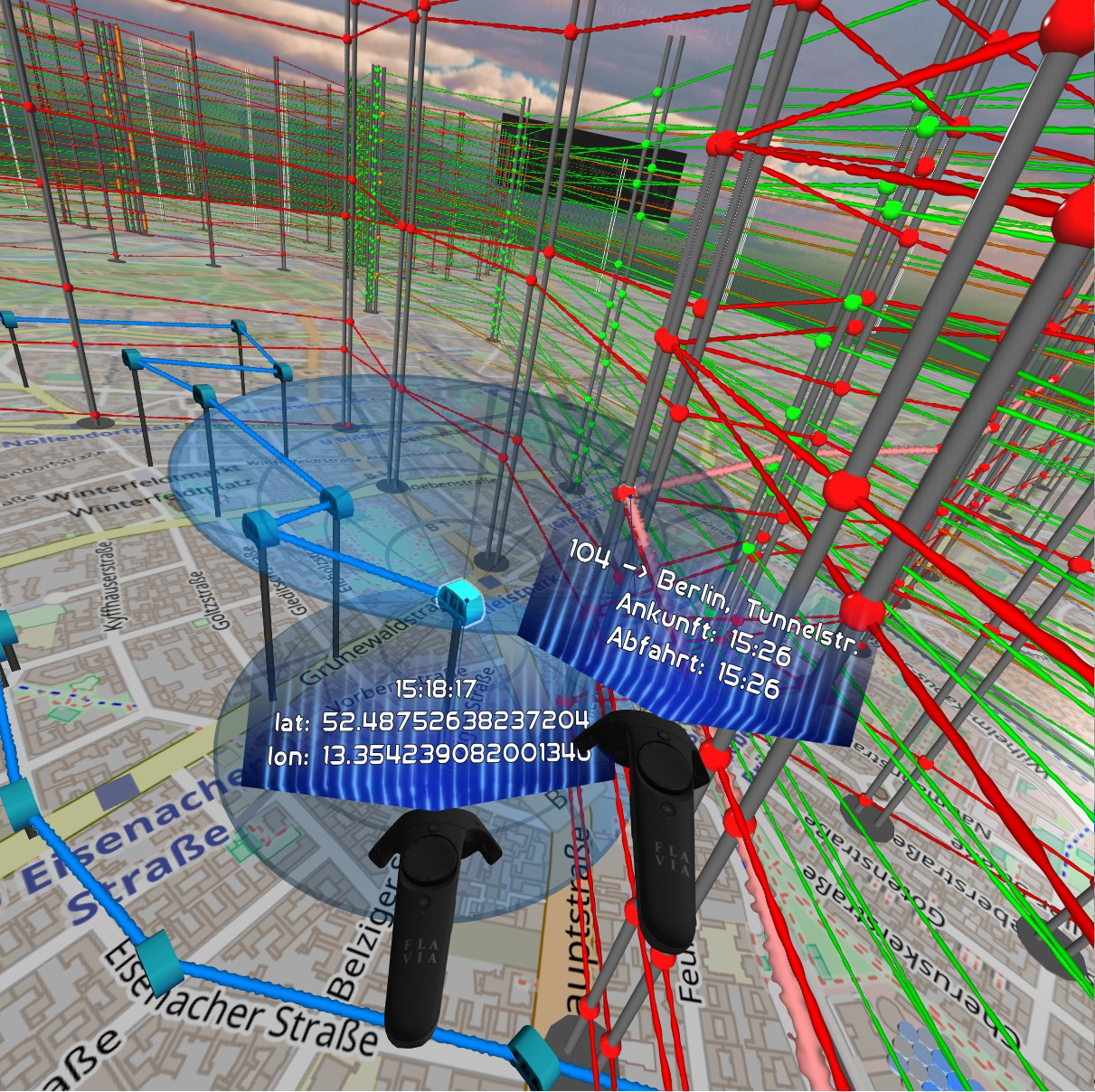
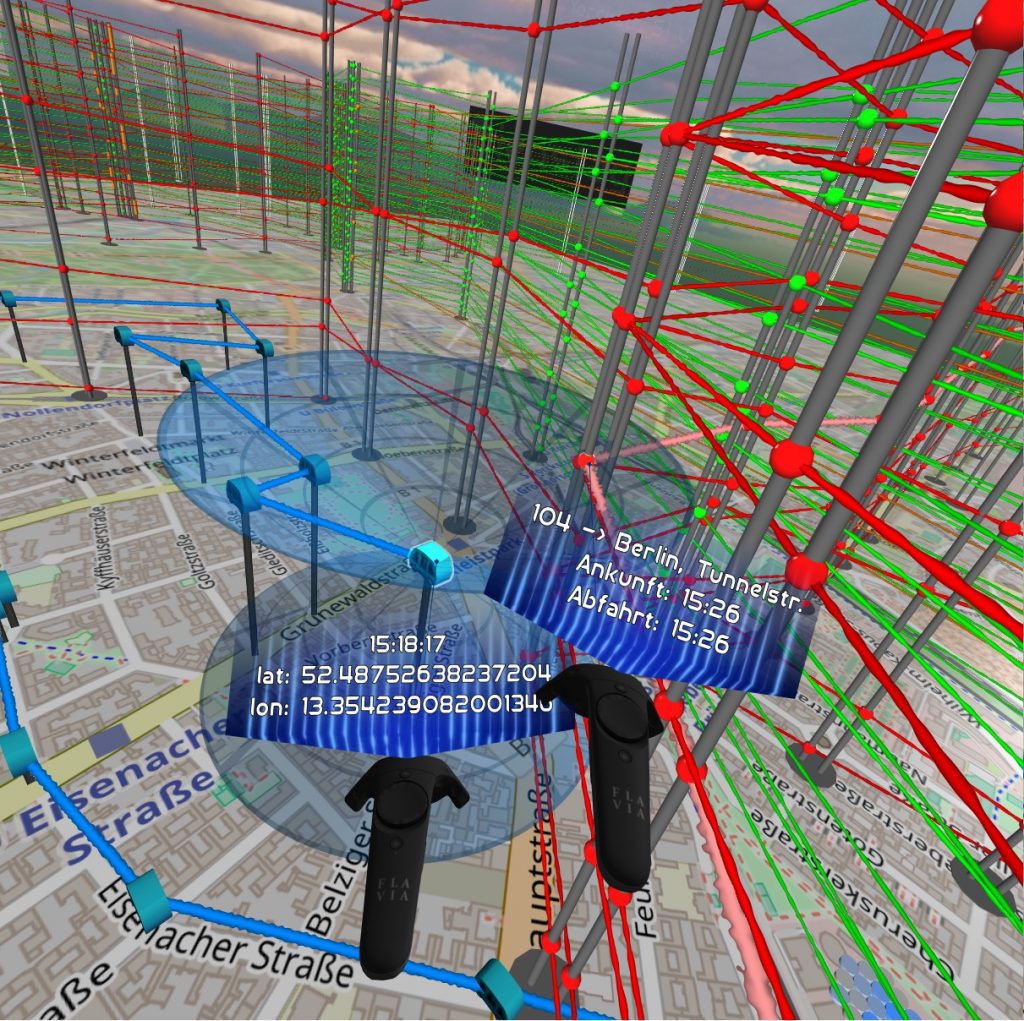
Mit unserer Demo stellen wir alle verfügbaren Daten über die Zeit projiziert auf einer schematischen Darstellung von Berlin dar. Dies ermöglicht es Nutzern intuitiv den zeitlichen und räumlichen Abstand zwischen mehreren Halte-Punkten abzuschätzen und zum Beispiel zu entscheiden ob eine Anschlussverbindung erreicht werden kann. Das komplexe Problem der Routenplanung im ÖPNV, also welche Linien welche Haltestellen in welcher Taktung anfahren um die optimale Mobilität für alle Kunden zu erreichen, kann so auf einfache Art visuell gelöst werden. Ein Interaktionsprototyp für die Erstellung neuer Linien des autonomen Shuttle illustriert diese Möglichkeit anschaulich.
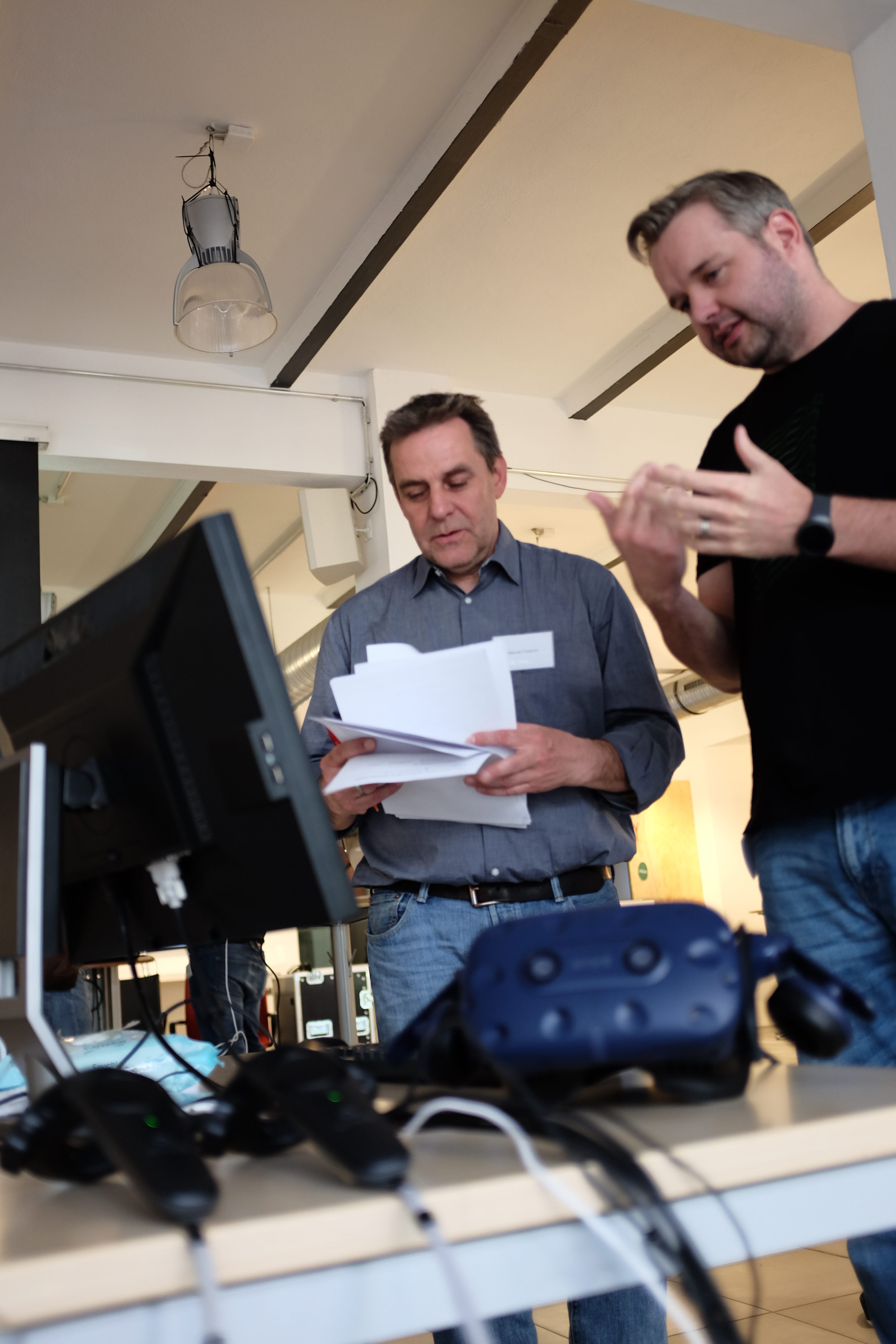
Alle Teams präsentierten Ihre Ergebnisse auf der gemeinsamen Abschlussveranstaltung am 04.05.2018 im Open Mobility Forum des InnoZ und wurden von einer hochkarätigen Jury bewertet. Unsere Demo hat vor allen Dingen mit Ihrem Innovationsgehalt und der technischen Umsetzung überzeugt und so einen hervorragenden zweiten Platz erreicht.
Möchten Sie die Lösung einmal selbst ausprobieren und gemeinsam mit uns erarbeiten welches Potential in Ihren Daten steckt? Wir freuen uns auf Ihren Kontakt!